Methods
-
acceleratemotors(value_startspeed, value_endspeed, value_duration)
-
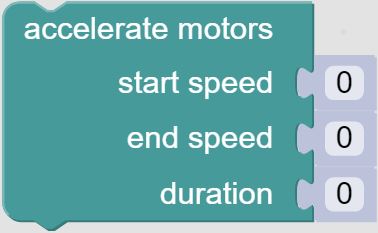
Accelerates the Wink motors from the start speed, to the end speed, over the duration time.
Check out the third party documentation for a more in depth explanation.Parameters:
Name Type Description value_startspeedaccepts values from 0-255. Determines the speed the Wink motors will start at.
value_endspeedaccepts values from 0-255. Determines the speed the Wink motors will end at.
value_durationhow long it will take the Wink bot to go from the start speed to the end speed.
Code Equivalent:
accelerateMotors(value_startspeed, value_endspeed, value_duration); -
bestill()
-
Stops the Wink motors.
Check out the third party documentation for a more in depth explanation.Code Equivalent:
beStill(); -
motors(value_leftspeed, value_rightspeed)
-
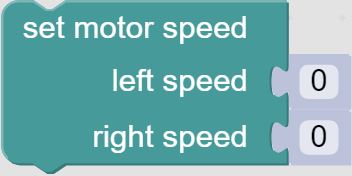
Sets the Wink motors to the given speeds.
Check out the third party documentation for a more in depth explanation.Parameters:
Name Type Description value_leftspeedthe speed the left motor will be
value_rightspeedthe speed the right motor will be
Code Equivalent:
motors(value_leftspeed, value_rightspeed); -
spinleft(value_speed)
-

Spins the Wink Bot left at the given speed. It will spin indefinitely until the program tells it otherwise or the Wink is turned off.
Check out the third party documentation for a more in depth explanation.Parameters:
Name Type Description value_speedthe speed to spin at. Accepts values from 0-255
Code Equivalent:
spinLeft(value_speed); -
spinright(value_speed)
-
Spins the Wink Bot right at the given speed. It will spin indefinitely until the program tells it otherwise or the Wink is turned off.
Check out the third party documentation for a more in depth explanation.Parameters:
Name Type Description value_speedthe speed to spin at. Accepts values from 0-255
Code Equivalent:
spinRight(value_speed); -
turn_by_values(dropdown_direction, number_speed, number_duration)
-

Turns the Wink bot in the given direction, at the given speed, for the given amount of time. The motors will be still after delay runs out.
This block merely automatically places spinDirection, delay, and beStill blocks. It chooses spinLeft or spinRight based on the dropdown selected.
Check out the third party documentation for a more in depth explanation.Parameters:
Name Type Description dropdown_directiondetermines the spin direction
number_speedthe speed to spin at. Accepts values from 0-255.
number_durationhow long to spin for
Code Equivalent:
spinLeft(number_speed); delay(number_duration); beStill(); OR spinRight(number_speed); delay(number_duration); beStill();