Methods
-
drive_arc(value_heading, value_left_speed, value_right_speed, value_max_expected_turn_time, value_max_expected_skid_time)
-
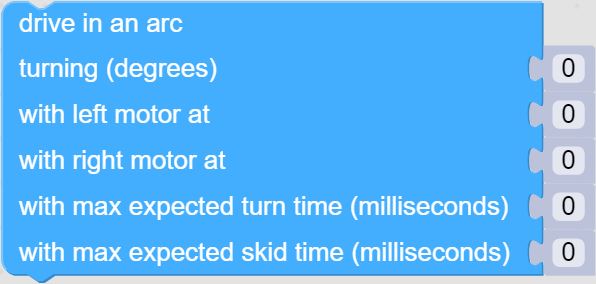
Makes the Ringo drive in the given direction while performing a turning movement.
Check out the third party documentation for a more in depth explanation.Parameters:
Name Type Description value_headingNumber the number of degrees to be rotated during the turn
value_left_speedNumber the speed for the left motor
value_right_speedNumber the speed for the right motor
value_max_expected_turn_timeNumber the time the Ringo will allow to reach its target rotation before moving on in the code
value_max_expected_skid_timeNumber the maximum time the Ringo will remain looking for a complete stop. It will skid on the surface for some period of time due to the rotational inertia
Code Equivalent:
DriveArc(value_heading, value_left_speed, value_right_speed, value_max_expected_turn_time, value_max_expected_skid_time); -
rotate_accurate(heading, max_expected_turn_time)
-

Makes the Ringo rotate in it's own footprint. If it over-shoots the target rotation, it will reverse direction and attempt to reach the target rotation more accurately.
Check out the third party documentation for a more in depth explanation.Parameters:
Name Type Description headingNumber the target rotation
max_expected_turn_timeNumber the maximum amount of time the Ringo will attempt to complete the rotation
Code Equivalent:
RotateAccurate(heading, max_expected_turn_time);